Yapay zeka, robotların dünyayı algılama biçimini önemli ölçüde geliştirdi.
Bilgisayarla görme, robotların nesneleri tespit etmesine, desenleri tanımasına ve karmaşık ortamlarda gezinmesine olanak tanır. Kameralar, robotların bir konveyördeki parçaları tanımlamasına, bir kutudaki paketleri bulmasına ve depolarda engellerden kaçınmasına yardımcı olur.
Ancak bir robot bir nesneyi alması gerektiğinde, yalnızca görme yeterli değildir.
Nesneleri güvenilir bir şekilde manipüle edebilmek için robotların, insanların sürekli olarak güvendiği bir şeye ihtiyaçları vardır: dokunma.
İşte burada dokunsal algılama hayati önem kazanır.
Görme, teması açıklayamaz
Günümüzdeki çoğu robotik sistem, kameralar üzerinde yoğun bir şekilde çalışmaktadır.
Görme, aşağıdakiler için iyi çalışır:
- nesne tespiti
- poz tahmini
- navigasyon
- sahne anlama
Ancak kameralar fiziksel etkileşimi ölçemez.
Bir robot bir nesneyi kavradığında, kameraların doğrudan gözlemleyemediği birçok kritik değişken ortaya çıkar:
- temas kuvveti
- baskı dağılımı
- sürtünme
- kayma
- malzemelerin uyumu
Örneğin, ıslak bir bardak, yumuşak bir bez veya sert bir metal parçasını almak için düşünün.
Her biri farklı bir kavrama stratejisi gerektirir. İnsanlar, hissettiklerimize dayalı olarak otomatik olarak kavrama gücünü ayarlar. Sadece görmeye dayanan robotlar, bu özellikleri dolaylı olarak çıkarmak zorundadır, bu da çok daha zordur.
Bu sınırlama, manipülasyonun robotikteki en büyük zorluklardan biri olmasının nedenini açıklar.
İnsanlar nesneleri manipüle etmek için dokunmaya güvenir
İnsan elleri, dokunmanın farklı yönlerini algılayan birkaç tür mekanoreseptör içerir.
Bu reseptörler, bize şunları algılamamıza olanak tanır:
- sürekli basınç
- titreşim
- cilt deformasyonu
- dokular
- sıcaklık
Birlikte, bu sinyaller, şunları yapmamıza yardımcı olur:
- bir nesne kaymaya başladığında kavramayı sıkılaştırmak
- manipülasyon sırasında parmak pozisyonunu ayarlamak
- baktığımızda nesneleri tanımak
Robotik sistemlerin güvenilir manipülasyon sağlamak için benzer yeteneklere ihtiyacı vardır.
Dokunsal algılama, robotların temas dinamiklerini algılama yeteneğini verir, bu da fiziksel dünya ile etkileşim için gereklidir.
Dokunsal sensörler robotların neleri algılamasını sağlar
Modern dokunsal algılama sistemleri, bir kavrama sırasında birkaç tür bilgiyi yakalayabilir.
Ana algılama modları şunları içerir:
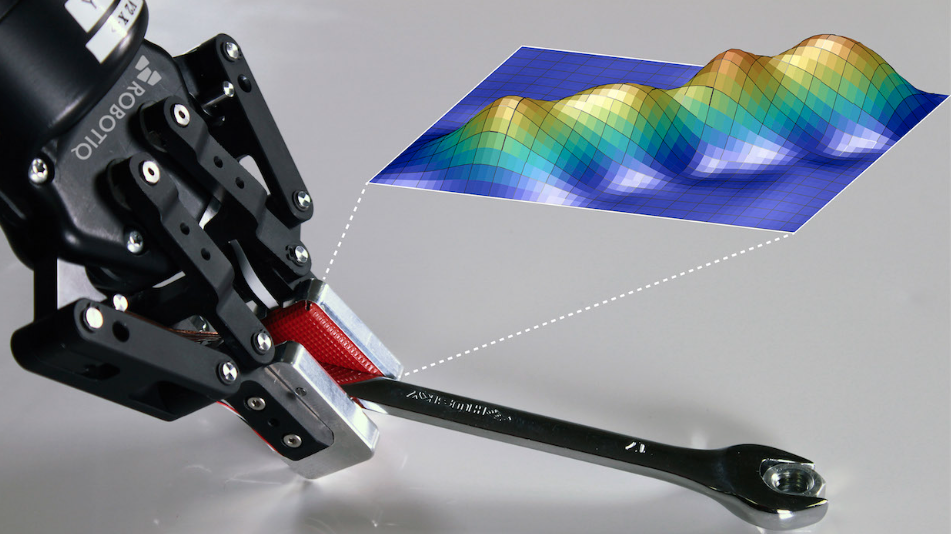
Baskı
Temasın boyutunu, şeklini ve yoğunluğunu ölçer.
Baskı verileri, robotların ş







