RLWRLD, gerçek dünya etkileşiminin ne yapılacağını tanımayı, zaman içinde ilgili durumu sürdürmeyi ve kararları fiziksel olarak anlamlı sinyallere dayandırmayı gerektirdiğini söyledi. | Kaynak: RLWRLD
RLWRLD, geçen hafta RLDX-1'i tanıttı; bu, yeni bir beceri odaklı temel model. Şirket, bu modeli, yüksek serbestlik derecesine (DoF) sahip robotik eller kullanarak gerçek dünya endüstrisindeki karmaşık görevleri ele almak için geliştirdi.
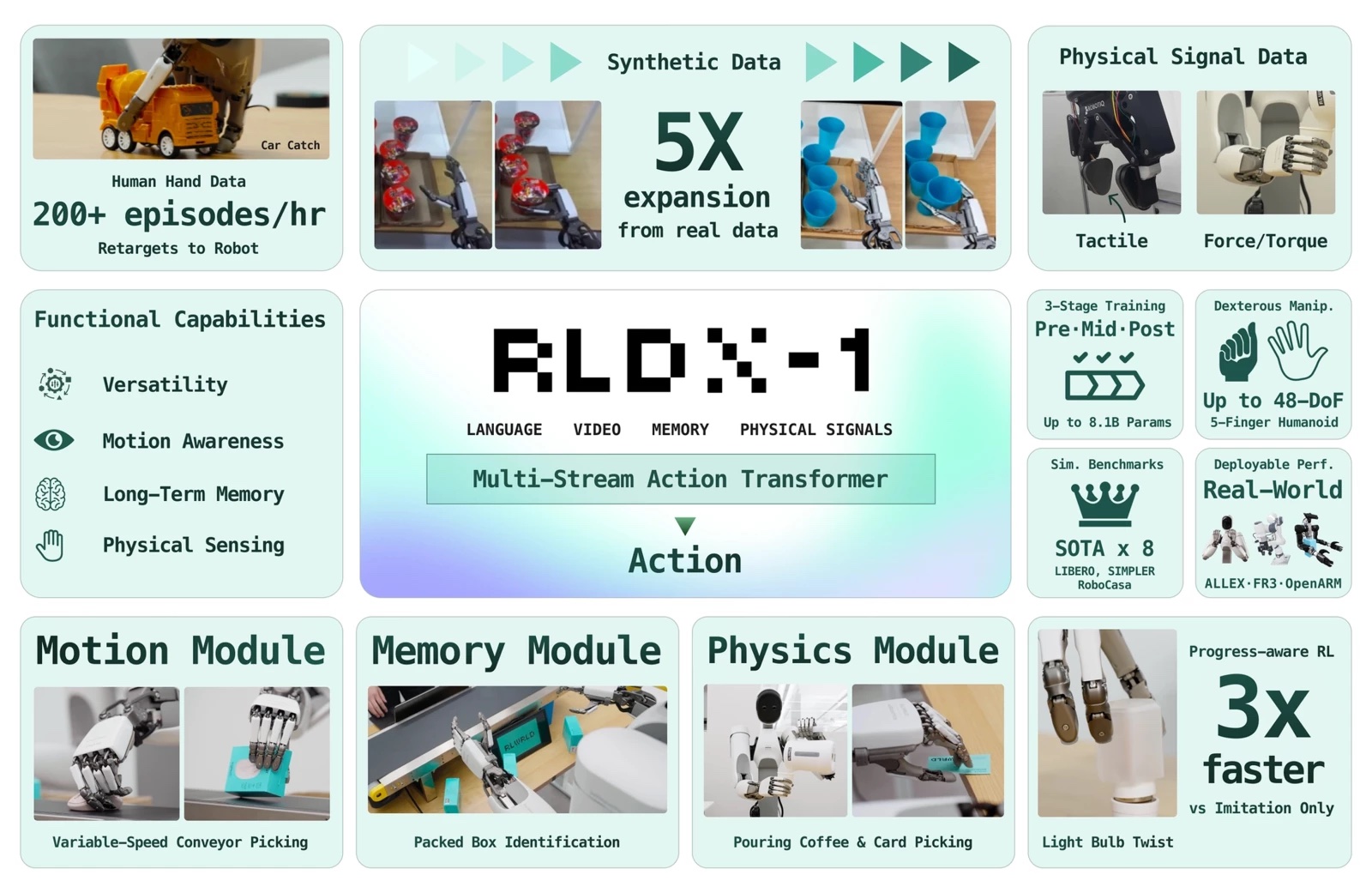
RLWRLD'ye göre, mevcut temel modeller, kesintisiz gerçek dünya dağıtımı için gereken bağlam hatırlama veya kuvvet algılama gibi temel yeteneklerden genellikle yoksundur. Bunu ele almak için RLDX-1, tam robotik yaşam döngüsünü kapsar. Ölçeklenebilir bir veri toplama hattı, çok yönlü mimari tasarım, sağlam eğitim metodolojileri ve optimize edilmiş dağıtım stratejileri entegre eder, dedi şirket.
Sonuç olarak, RLDX-1, RLWRLD'nin iddiasına göre, en son teknoloji performansı elde ediyor. Model, hem simüle edilmiş ortamlarda hem de fiziksel endüstriyel uygulamalarda hassasiyet ve genelleme sergiliyor.
RLWRLD, RLDX-1 temel modelini becerikli robot elleri için sıfırdan tasarladı. Her bileşen, gerçek bir görevde belirli bir hata modunun gerektirdiği için mevcuttur. Sonuç, görebilen, hissedebilen, hatırlayabilen ve uyum sağlayabilen tek bir modeldir; bu model, yüksek DoF'ye sahip ellerle tek kollu, çift kollu ve insansı biçimlerde dağıtılabilir.
RLWRLD, beş beceri rejimini tanımlıyor
Endüstriyel otomasyonun son aşaması beceridir. Günümüz robotları, potanın hafiflediği durumlarda güvenilir bir şekilde kahve dökemez, hareket eden bir nesneyi bir konveyörden alıp çıkaramaz veya parmak uçlarıyla bir altıgen somunu döndüremez, dedi Seul, Güney Kore merkezli RLWRLD.
RLWRLD, bu tekrarlayan müşteri ihtiyaçlarını DexBench adlı bir ölçüt haline getirdi; bu ölçüt, her bir rejimin, günümüz robotlarının belirli bir hata modunu temsil ettiği beş beceri rejimi boyunca düzenlenmiştir.
Bu beş rejim şunlardır:
- Kavrama çeşitliliği: Beş parmaklı eller, aşağıdaki her rejimin varsaydığı ön koşuldur. RLWRLD, bunlardan 10'dan fazlasını kendi bünyesinde gerçekleştirmiştir. Kavramayı çeşitlendirmek için iki veri hattı kullanır. Sentetik robot verileri, küçük bir teleoperasyon setinden gelen bir veri kümesini artırırken, İnsan Verileri, teleoperasyonun ulaşamadığı yüksek DoF'ye sahip eldeki beceriyi kapsar.
- Uzamsal hassasiyet: Politika, temasın yapılmadan önce doğru bir şekilde yerleştirilmesi için yeterli sahne yapısını yakalamalıdır. RLDX-1, bu yeteneği, robot görsel soru ve cevaplama (VQA) üzerinde ince ayar yapılmış bir robot özel görsel dil modeli (VLM) ile güçlendirir; burada sorular, robot uç etkileyici ile hedef nesne arasındaki geometrik ilişkiye açıkça odaklanır. Bu eğitim, VLM'nin nesne konumlarını ve hassas temas yerleştirmesi için kritik olan mekansal ilişkileri daha iyi anlamasını teşvik eder.
- Zamansal hassasiyet: Tek bir çerçeve politikası, nesnelerin nerede olduğunu taahhüt eder; el geldiğinde, konveyör nesnesi hareket etmiştir.






