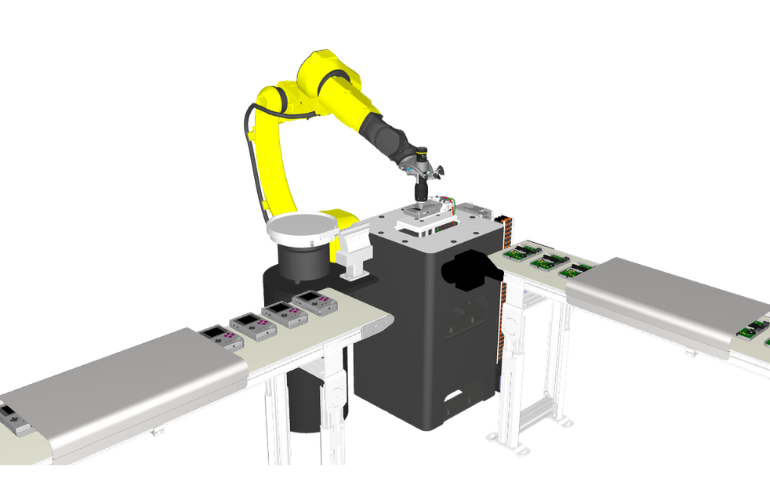
Simülasyon ve çevrimdışı programlama yetenekleri, işleme ile sınırlı kalmayıp montaj, yüzey işleme ve kaynak gibi görevleri de içermektedir. Bu RoboDK yazılımının ekran görüntüsü, gelişmiş bir montaj uygulamasının hızlı ve güvenli bir şekilde programlanmasını ve dağıtımını sağlamak için tasarlanmış bir simülasyonu göstermektedir. Kredi: RoboDK
Robotik işleme son yıllarda, robot maliyetlerinin düşmesi ve artan esneklik sayesinde popülaritesini artırmıştır. Büyük CNC makineleri ile karşılaştırıldığında, endüstriyel robotlar nispeten ucuz, taşınması kolaydır ve birden fazla uygulamada yeniden kullanılabilir.
CNC makineleri, havacılık gibi hassasiyetin kritik olduğu sektörler için altın standarttır çünkü oldukça öngörülebilirler. Ancak, yüksek karışım/düşük hacim partileri ile ilgilenen ve katı havacılık gereksinimlerine tabi olmayan sektörlerde faaliyet gösteren şirketler için CNC makineleri aşırı mühendislik yapılmış bir çözüm olabilir.
Ahşap, köpük, plastik, alüminyum ve giderek daha fazla hatta sert malzemeler gibi materyaller için robotlar, gerekli kaliteyi feda etmeden aşırı mühendislik yapılmış CNC çözümlerine göre önemli ölçüde daha düşük maliyetli bir alternatif sunar.
Robot karmaşıklığını anlamak
Şu ana kadar her şey yolunda, ancak robotlar benzersiz karmaşıklıklar getirir. Örneğin, CNC makineleri belirgin bir şekilde tanımlanmış, dikdörtgen bir çalışma alanında çalışırken, bir robotun çalışma alanı küresel ve eklem bağımlıdır. Bu, hedef nokta robotun erişim alanında olsa bile, gerekli yönlendirme ile erişilemeyebileceği anlamına gelir.
Bu kısıtlamalar yönetilebilir, ancak yalnızca önceden anlaşıldığında ve bu da robot hücresi tasarımı ve programlaması hakkında önemli bilgiye sahip son kullanıcıları gerektirir.
Programlama darboğazı
Robotik işleme uygulamalarını manuel olarak programlamak, test etmek ve doğrulamak için geçen süre, robotik işleme dağıtımlarında büyük bir darboğazdır. İşte burada çevrimdışı programlama (OLP) yazılımları, özellikle entegre CAM (bilgisayar destekli üretim) yeteneklerine sahip olanlar, gerçek bir fark yaratabilir.
Basit robotik uygulamalar, örneğin alma ve yerleştirme gibi, manuel programlamanın hala yaygın olduğu yerlerdir. İşleme uygulamaları çok farklıdır. Genellikle robotların yüz binlerce hatta milyonlarca noktayı takip etmesini gerektirir. Her nokta doğru bir şekilde konumlandırılmalı, uygun bir şekilde yönlendirilmelidir ve çarpışmalar, eksen sınırları veya tekillikler olmadan uygulanmalıdır.
Böyle yolları manuel olarak tanımlamak insanın yapabileceği bir şey değildir. Orta derecede karmaşık şekiller bile, insan programcıların el ile başaramayacağı bir hassasiyet ve tekrarlanabilirlik düzeyi gerektirir.
Ayrıca, manuel yaklaşımlar genellikle deneme-yanılma ve robotik işleme hücresinde uygulama doğru çalışana kadar tekrar tekrar ayarlamalar yapmaya dayanır. Bu, ekipmanı meşgul eder, dağıtım sürelerini günler ve haftalar boyunca uzatır ve atılan parçalar ve hasar görmüş aletler riski artırır.