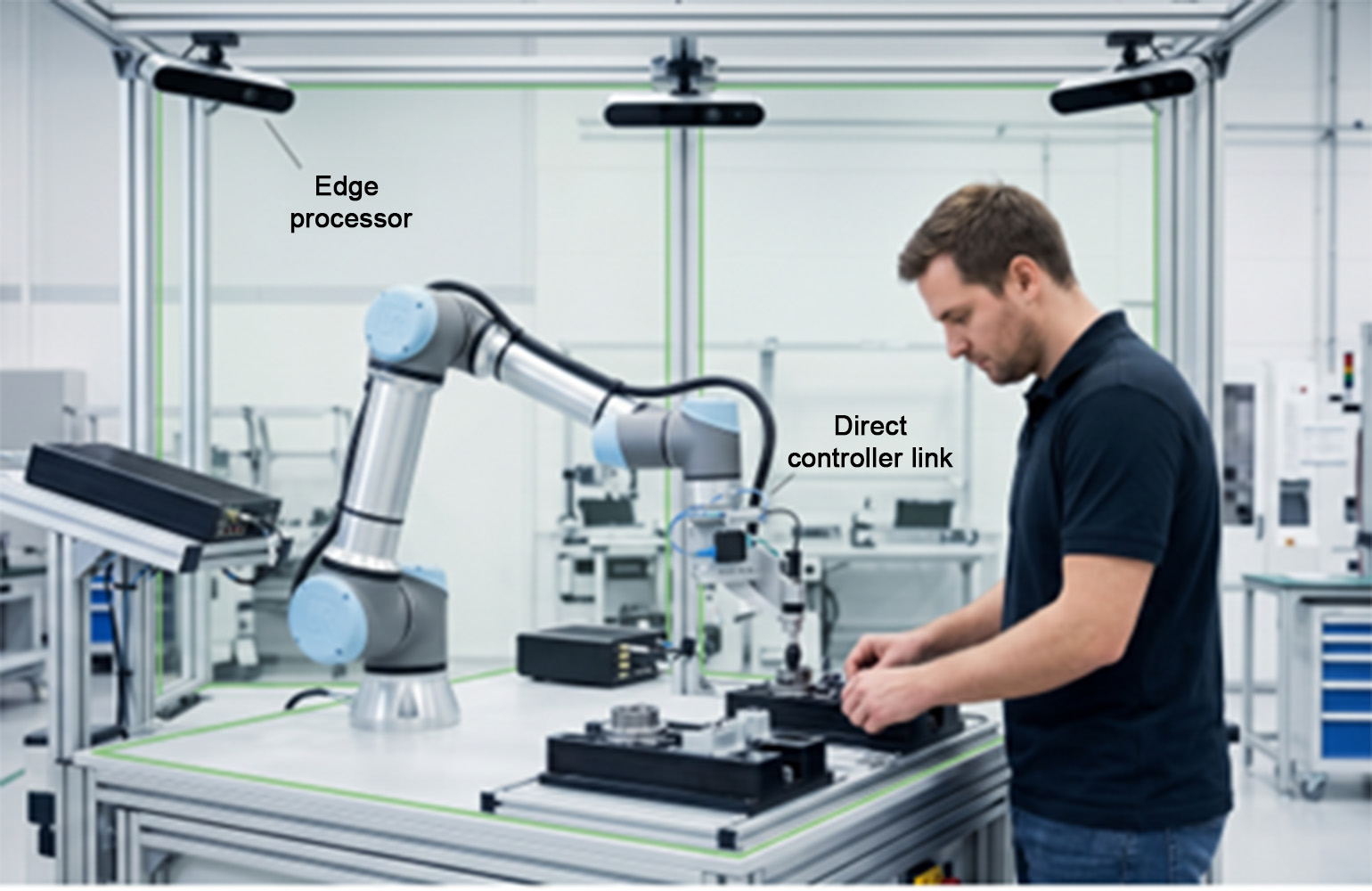
Gecikme, işbirlikçi montaj hücrelerinde güvenlik riskleri oluşturabilir. Kaynak: Cogniedge.ai
Bulut tabanlı görüntü sistemleri endüstriyel analitik ve öngörücü bakımda iyileşmeler sağladı, ancak gerçek zamanlı güvenlik ve verimlilik en önemli olduğunda yetersiz kalıyor. Yüksek karışımlı işbirlikçi montaj hücrelerinde, hatta mütevazı bir ağ gecikmesi bile umut verici bir insan-robot işbirliği (HRC) kurulumunu duraklama ve hareket etme sıkışıklığına dönüştürebilir.
Endüstrinin daha işbirlikçi robotlara yönelimi, daha güvenli kafesler veya daha yavaş hızlardan daha fazlasını gerektiriyor. Bu, cobotların insan hareketine ve yorgunluğuna dinamik olarak uyum sağlamasına olanak tanıyan mimariler gerektiriyor, aynı zamanda döngü süresi ve güvenliği koruyor.
Anahtar, AI çıkarımını kenara taşımak ve kenar işlemcisinden robot kontrolörüne doğrudan, düşük gecikmeli bir köprü kurmaktır; bu, dinamik kinematik ayarlamalar için eski PLC'yi (programlanabilir mantık kontrolörü) atlayarak yapılır.
Hız ve ayrım izleme gecikmesinin fiziği
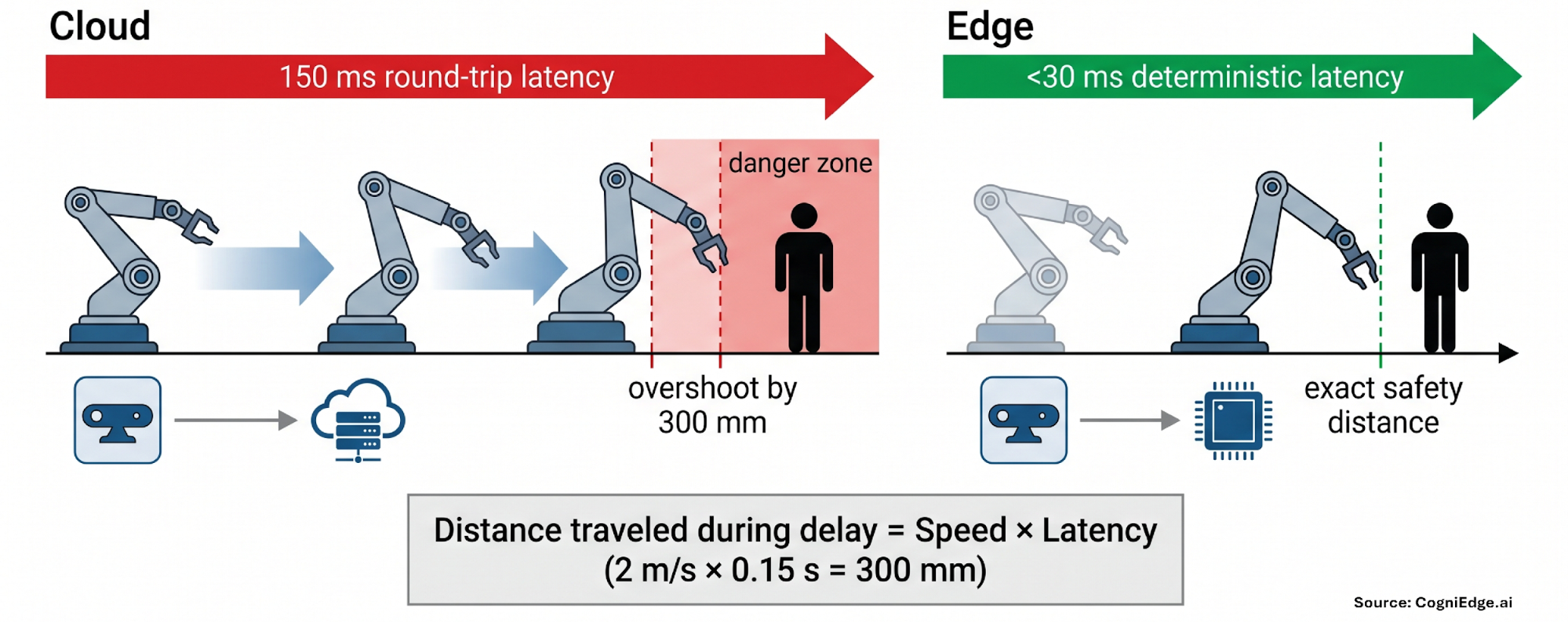
Kaynak: Cogniedge.ai
ISO/TS 15066, hız ve ayrım izlemeyi (SSM) işbirlikçi robotlar için temel bir güvenlik yöntemi olarak tanımlar. Standart, robotun operatörden koruyucu bir ayrım mesafesi korumasını ve bu mesafe ihlal edildiğinde hızını azaltmasını veya durmasını gerektirir.
Tipik bir yüksek çözünürlüklü derinlik kamerası uzaktan bir sunucuya iskelet izleme verisi gönderdiğini düşünün. Görüntü iletimi, çıkarım ve komut dönüşü dahil olmak üzere gidiş-dönüş gecikmesi genellikle 100 ila 200 milisaniye arasında değişir.
Orta düzeyde bir kol hızı olan 2 m/s'de, robot bu gecikme sırasında 200 ila 400 mm (7.8 ila 15.7 inç) yol alır. Kompakt bir işbirlikçi hücrede, 300 mm (11.8 inç) kör nokta, güvenli operasyon ile potansiyel yaralanma arasındaki farktır.
Telafi etmek için mühendisler güvenlik bölgelerini genişletir ve muhafazakar hızlar veya sık koruyucu duraklamalar programlar. Sonuç, işbirlikçi otomasyonun amacını bozan azalmış verimlilik olur.
Dinamik ortamlarda gerçek zamanlı SSM, 30 ms'nin altında belirleyici uçtan uca gecikme gerektirir—bu, yalnızca işlemcinin sensörden milimetrelerce uzakta gerçekleştiği ve karar yolunun doğrud







